| |
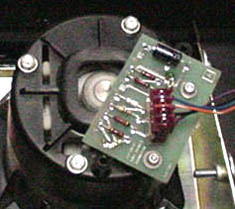
This is the stick used in I,Robot. The big problem you get with these sticks it that the hall effect sensors bend back away from the magnets after a while and the response gradually gets worse and worse. The only way to correct this it to open up the panel and bend the sensors until you get the proper output. The handle on these sticks can also be spun around, a feature I dont like. |
| |
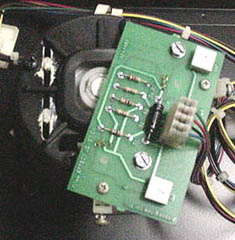
This is the newer version of the hall stick that came out on all games after I,Robot. It has 2 screws that hold the hall sensors against the magnets so they cannot be bent back. Also,the handle also does not spin, and a couple pots were added so the sensitivity can be adjusted without having to physically move the hall sensors. |
 |
This is the joystick test mode in I,Robot. The idea behind this test is you move the joystick around the screen and adjust the joystick until the range will only fill the yellow box. |
 |
This stick is somewhat misadjusted and needs to be calibrated. The joystick settings are saved and checked at game powerup. If the stick is not centered in the same position, the game will prompt you to center the stick and press fire to calibrate. |