
|
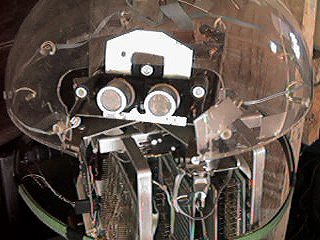
I did not build Kermit. It was originally built by Atari's Engineering group in Grass Valley, California. Kermit was abandoned in the Sunnyvale offices, and I rescued him. I did some electronic work to make it run again (needed some rework on a some parts, and all the motion sensors for the wheels and head needed to be changed) and wrote some new software to make it do different things. As you can see, he is not in the best shape right now. It will power up (the battery is dead, but a desk power supply will work) but one motor has gone bad, and the sensors are out again. He also took a spill down the stairs at Atari in his last few days (my own fault for just letting him run free around the building) and it cracked his head (a plastic bowl) and broke a bunch of the bulbs in the head dome. Some day I may actually get him running again. The hair was a joke of mine! There is a small button under the hair, so if you pet him, he stops and purrs! I also MADE the name badge, it was not an official badge. The security people were VERY angry that I made it, because it looked so good. If you look at picture 10, you can see the sensors. The two big ones are ultrasonic, like the old Polaroid cameras. His head can rotate 180 degrees in EACH direction so he can "see" 360 degrees. When he would bump something, or sense an object in his way, he would stop and rotate his head through the full 360 mapping all directions, then go in the direction that had the greatest distance clear. Next to the ultrasonic sensors are two microphones for sound. At the time, the only sensed sharp sounds like a hand clap. When the heard a clap. He would stop and turn his head towards the sound. A second clap would further define the direction and he would head towards the sound. Below is a small heat sensor (we wanted him to look for warm bodies, but he would head into fireplaces. Never got that working. Above is a light sensor, "walk towards the light" was the idea. If a room went dark, he would look for light and sound. Also visible is a small "leash" connector (directly under the dome below his left (our right) mic. This was a pot with a small switch. If you pulled on the leash, the switch would close and Kermit would try and center the leash to go that direction. He would continue to move "forward" or which ever way centered the leash until the switch opened (ie, he got close) and then wait for about 30 seconds before trying to move on his own. His first move was always straight backwards to see if the leash would tighten and close the switch. He also has an antenna for remote control (used an old Radio Shack walkie-talkie with some tones for remote (required another board to be plugged into the bus slots (there is one empty.) There are 4 boards in Kermit right now. Photos 2 and 7 show the end board which had all the sensor interface circuits and light drivers for the head. In Kermit 4 you can see the other board in the slots. The next one over is a "mouse brain", which is a small 6502 and EEPROM and RAM. The third board is a sound driver, simple wave circuits for music like sounds. He sounds a bit like R2D2! The last board is the driver relays for the stepper motors for the back wheels. The wheels are direct driven by stepper motors that are held in by springs against the wheels. The front wheel is simply a castor with a leaf switch attached. The idea was that IF the leaf switch opened, Kermit would do an "emergency back" move. Basically, an R2D2 scream sound and both motors back as fast as possible for a short burst. Again, this was assumed that he was going over a ledge. Unfortunately, his death was in just such a move, as his weight is too front heavy, and he screamed and spun his wheels backwards as he tumbled down the stairs at Atari (seems that the stairs were the longest open space, and while the switch did work, he weight tipped him over head first before he could back up.) 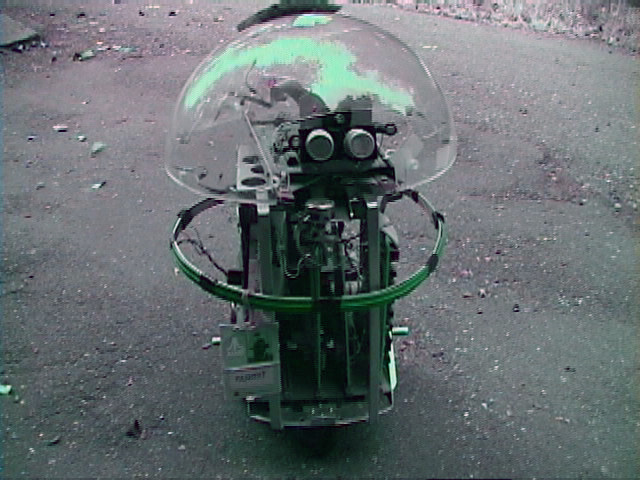 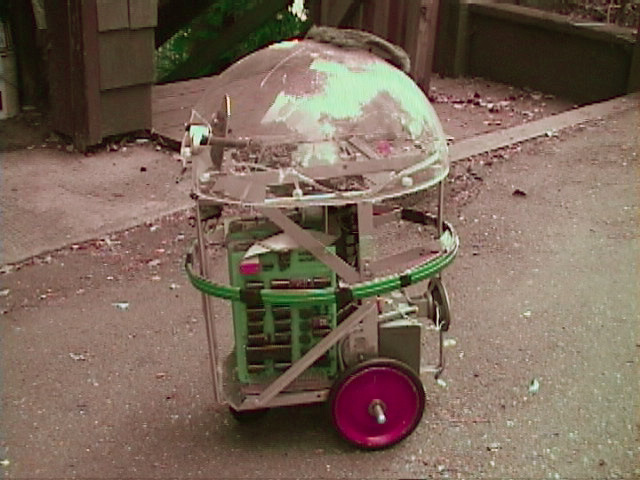 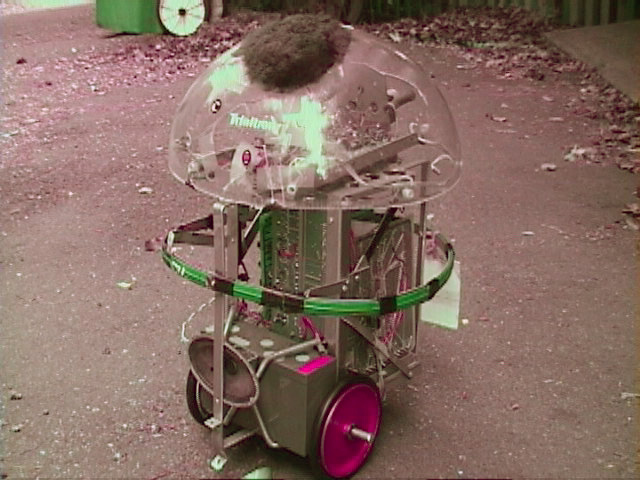   
|  |